
”ROS 机械臂“ 的搜索结果
本文介绍如何为简单的 4 自由度机器人手臂创建 ROS 包,并在 Rviz 中模拟预定义的关节路径机器人通常很昂贵,并且很容易受到损坏以及与自己或周围环境的不良交互。...机械臂是上个世纪最常见的机器人。
包括SLAM建图导航算法部署,Moveit2.0机械臂挖掘动作仿真,Matlab-ROS联合通信显示雷达图,并控制Gazebo移动。 pudong: 基础模型,可以rviz中查看。 pudong_gazebo: 可以用于Gazebo中的模型,另包含一些算法。 ...
机器人操作系统ROS(九):MoveIt!与机械臂控制
一文入门机械臂控制 ros gazebo rviz python moveit
【Autolabor初级教程】ROS机器人入门机器人操作系统 ROS 快速...是机械臂相关的工具集软件,集成了各种功能:Ø 运动学(Kinematics)Ø 运动规划(Motion Planning)Ø 碰撞检测(Collision Checking)Ø 3D 感知(Perception)
C++本科毕业设计ros机械臂代码上位机部分源码。ros机械臂代码上位机部分,使用smartarm作为机械臂载体 ros_moviet控制,作为毕业设计C++本科毕业设计ros机械臂代码上位机部分源码。ros机械臂代码上位机部分,使用...
课件_ROS机械臂开发_4.ROS机械臂开发中的主角MoveIt!.pdf
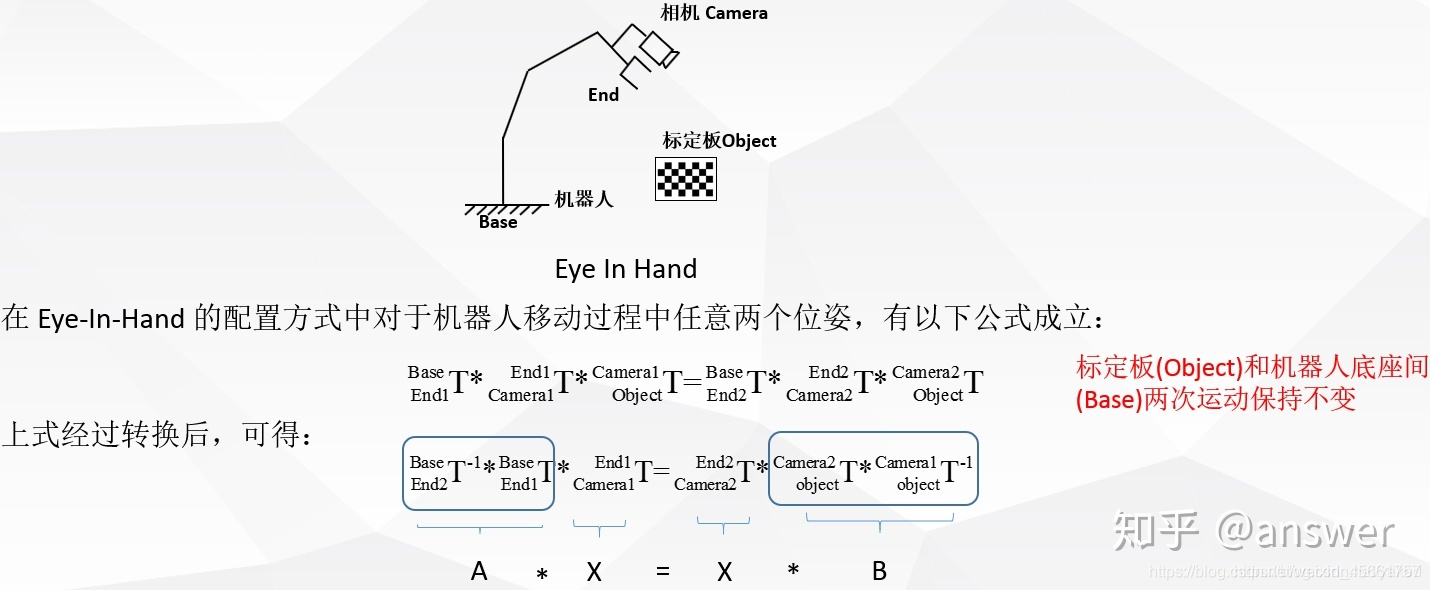
Ubuntu系统下ROS机械臂(睿尔曼)与摄像头标定(RealSense)教程(眼在手上) ROS系统搭建 系统:Ubuntu 18.04 ROS:melodic OpenCV 库:OpenCV 3.2.0 Realsense D435: Marker 标记识别:Aruco 功能包 手眼标定:easy...
ROS机械臂的moveit编程实现和视觉应用学习源码
代码_ROS机械臂开发_4.ROS机械臂开发中的主角MoveIt!.zip
关于ros机械臂开发的相关资料
ros机械臂仿真,课件和代码。包括机械臂的各个知识点,从机械臂的轨迹规划,到视觉感知都包括,提供了仿真代码,不需要实际的机械臂,也可以操作仿真机械臂。
denso机械臂运动控制程序,ROS-Hydro环境
当我们设计一个新设备时,需要创建一个3D模型来判断其总体外观、尺寸、装配参数、可制造性、有限元分析等。但这些模型或多或少都是虚拟的,我们可以手动移动。但是假设你正在设计一个机器人、一辆自动驾驶汽车、一架...
ROS机械臂开发:从入门到实践 第1章: 基础原理篇 第1节: ROS的过去、现在和未来 任务1-1: 【课件】ROS的过去、现在和未来.pdf 任务1-2: 【视频】ROS的过去、现在和未来 43:52 任务1-3: 资料.txt 第2节: 风靡...


基于ROS的机械臂运动控制源代码,包含六自由度机械臂的Rviz仿真模型、moveit运动轨迹规划、机械臂运动控制以及相机标定等源代码及脚本程序。
基于MATLAB与ROS的机械臂虚实结合实验平台.pdf
机械臂尺寸图

文章信息:标题:ROS机械臂启动碰撞检测和启动捡拾算法时出现的两个错误,有大佬能帮忙解决吗?赏金有偿!!~python原文地址:https://fishros.org.cn/forum/api/topic/93关键词:机械臂,碰撞检测,参与者:,,,版权...

matlab机械臂逆运动学代码 ReadMe File Folder Presentation /code 含probot_gazebo ROS Package; 其中/src 下包含实验1-5&大作业代码 /img 文档内所需图片 /video 验证视频 /doc md文档 /experiment 机械臂敲铃实物...
ROS机械臂模型的调试
标签: 其他
用传感器串口输出数据控制虚拟机ROS中的6DOF机械臂模型。(每次重新调试都需要一定的时间熟悉过程,所以记录一下。不记录代码只记录调试过程) 串口配置 传感器通过USB转TTL模块接到电脑,在虚拟机终端,输入: ls...
第一题 练习ROS Tutorials教程 如图1.1所示,熟悉了tutorials中所使用的基本命令。 1.1 使用catkin_make 在一个工作空间下:catkin_make catkin_make install(可选,与devel功能类似) 编译完成后使用ls命令即可...
ros机械臂开发教程 视频教程,内容涵盖从入门到实战
利用ROS控制机械臂运动的详细配置方法(all in),其中包括solidworks模型的处理及配置;
推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地